8、【对线面试官】AQS & ReentrantLock
今天我们来聊聊lock锁吧?
你知道什么叫做公平和非公平锁吗
- 公平锁指的就是:在竞争环境下,先到临界区的线程比后到的线程一定更快地获取得到锁
- 那非公平就很好理解了:先到临界区的线程未必比后到的线程更快地获取得到锁
如果让你实现的话,你怎么实现公平和非公平锁?
- 公平锁可以把竞争的线程放在一个先进先出的队列上
- 只要持有锁的线程执行完了,唤醒队列的下一个线程去获取锁就好了
- 非公平锁的概念上面已经提到了:后到的线程可能比前到临界区的线程获取得到锁
- 那实现也很简单,线程先尝试能不能获取得到锁,如果获取得到锁了就执行同步代码了
- 如果获取不到锁,那就再把这个线程放到队列呗
- 所以公平和非公平的区别就是:线程执行同步代码块时,是否会去尝试获取锁。
- 如果会尝试获取锁,那就是非公平的。如果不会尝试获取锁,直接进队列,再等待唤醒,那就是公平的。
为什么要进队列呢?线程一直尝试获取锁不就行了么?
- 一直尝试获取锁,专业点就叫做自旋,需要耗费资源的。
- 多个线程一直在自旋,而且大多数都是竞争失败的,哪有人会这样实现的
- 不会吧,不会吧,你不会就是这样实现的吧
那上次面试所问的synchronized锁是公平的还是非公平的?
- 非公平的。
- 偏向锁很好理解,如果当前线程ID与markword存储的不相等,则CAS尝试更换线程ID,CAS成功就获取得到锁了
- CAS失败则升级为轻量级锁
- 轻量级锁实际上也是通过CAS来抢占锁资源(只不过多了拷贝Mark Word到Lock Record的过程)
- 抢占成功到锁就归属给该线程了,但自旋失败一定次数后升级重量级锁
- 重量级锁通过monitor对象中的队列存储线程,但线程进入队列前,还是会先尝试获取得到锁,如果能获取不到才进入线程等待队列中
- 综上所述,synchronized无论处理哪种锁,都是先尝试获取,获取不到才升级||放到队列上的,所以是非公平的
嗯,讲得挺仔细的。AQS你了解吗?
- 嗯嗯,AQS全称叫做AbstractQueuedSynchronizer
- 是可以给我们实现锁的一个 「框架」,内部实现的关键就是维护了一个先进先出的队列以及state状态变量
- 先进先出队列存储的载体叫做Node节点,该节点标识着当前的状态值、是独占还是共享模式以及它的前驱和后继节点等等信息
- 简单理解就是:AQS定义了模板,具体实现由各个子类完成。
- 总体的流程可以总结为:会把需要等待的线程以Node的形式放到这个先进先出的队列上,state变量则表示为当前锁的状态。
- 像ReentrantLock、 ReentrantReadWrite Lock、 CountDownLatch、 Semaphore 这些常用的实现类都是基于AQS实现的
- AQS支持两种模式:独占(锁只会被一个线程独占)和共享(多个线程可同时执行)
你以ReentrantLock来讲讲加锁和解锁的过程呗
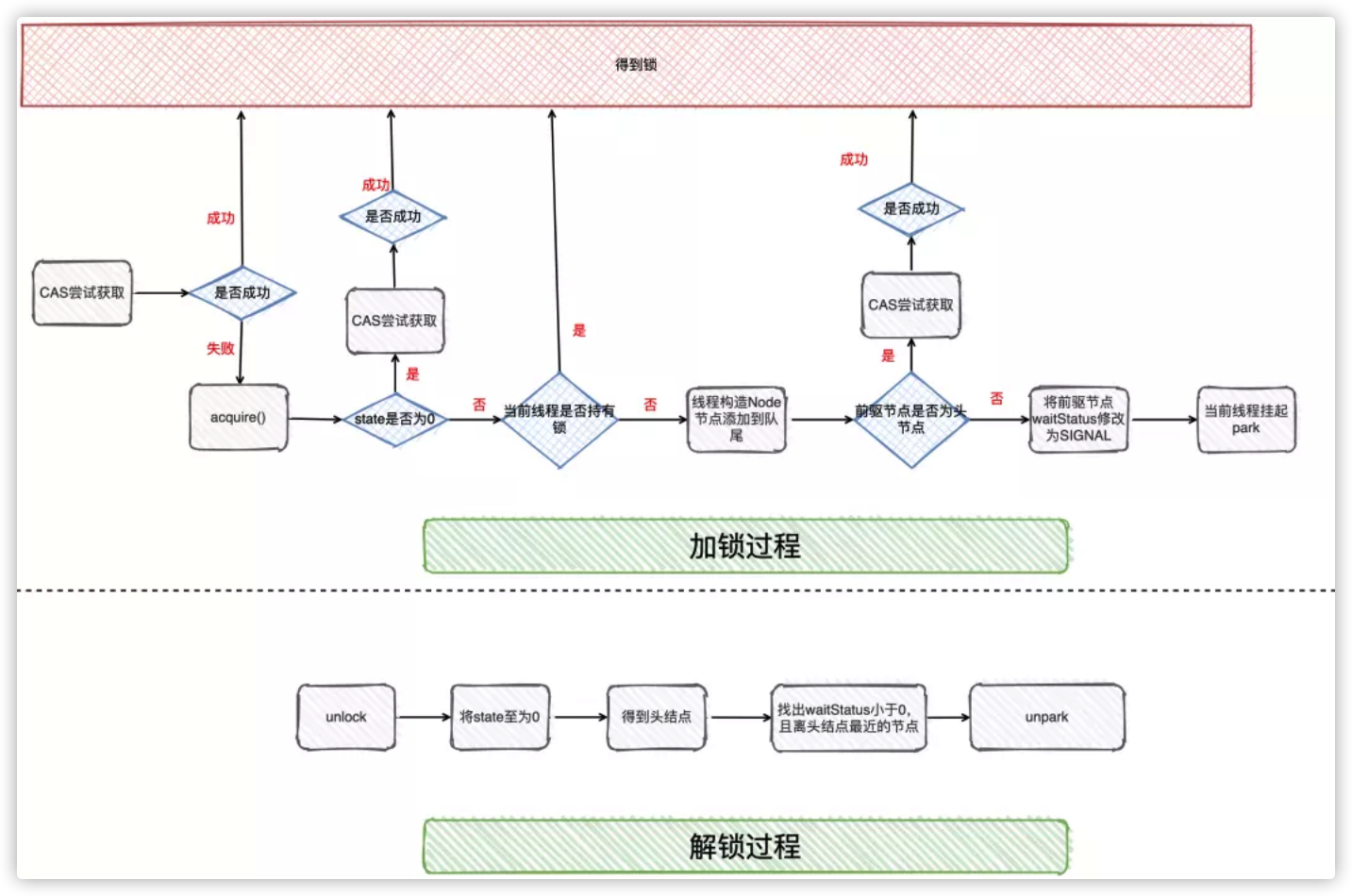
- 以非公平锁为了,我们在外界调用lock方法的时候,源码是这样实现的
- CAS尝试获取锁,获取成功则可以执行同步代码
- CAS获取失败,则调用acquire方法acquire方法实际上就是AQS的模板方法
- acquire首先会调用子类的tryAcquire 方法(又回到了ReentrantLock中)
- tryAcquire方法实际上会判断当前的state是否等于0,等于0说明没有线程持有锁,则又尝试CAS直接获取锁
- 如果CAS获取成功,则可以执行同步代码
- 如果CAS获取失败,那判断当前线程是否就持有锁,如果是持有的锁,那更新state的值,获取得到锁(这里其实就是处理可重入的逻辑)
- CAS失败&&非重入的情况,则回到try Acquire方法执行「入队列」的操作
- 将节点入队列之后,会判断「前驱节点」是不是头节点,如果是头结点又会用CAS尝试获取锁
- 如果是「前驱节点」是头节点并获取得到锁,则把当前节点设置为头结点,并且将前驱节点置空(实际上就是原有的头节点已经释放锁了)
- 没获取得到锁,则判断前驱节点的状态是否为SIGNAL,如果不是,则找到合法的前驱节点,并使用CAS将状态设置为SIGNAL
- 最后调用park将当前线程挂起
你说了一大堆,麻烦使用压缩算法压缩下加锁的过程。
压缩后:当线程CAS获取锁失败,将当前线程入队列,把前驱节点状态设置为SIGNAL状态,并将自己挂起。
为什么要设置前驱节点为 SIGNAL状态,有啥用?
- 其实就是表示后继节点需要被唤醒,你咋啥都不知道啊?跟你沟通有点烦.我先把解锁的过程说下吧
- 外界调用unlock方法时,实际上会调用AQS的release方法,而release方法会调用子类tryRelease方法(又回到了ReentrantLock中)
- tryRelease会把state一直减(锁重入可使state>1),直至到0,说明当前线程已经把锁释放了
- 随后从队尾往前找节点状态需要<0,并离头节点最近的节点进行唤醒
- 唤醒之后,被唤醒的线程则尝试使用CAS获取锁,假设获取锁得到则把头节点给干掉,把自己设置为头节点成
- 解锁的逻辑非常简单哈
- 压缩一下:把state置0,唤醒头结点下一个合法的节点,被唤醒的节点线程自然就会去获取锁
- 回到上一个问题,为什么要设置前驱节点为SIGNAL状态
- 其实归终结底就是为了判断节点的状态,去做些处理。
- Node中节点的状态有4种,分别是:CA NCELLED(1)、 SIGNAL(-1)、 CONDITI ON(-2)、 PROPAGATE(-3)和0。
- 在ReentrantLock解锁的时候,会判断节点的状态是否小于0,小于等于0才说明需要被唤醒
- 另外一提的是:公平锁的实现与非公平锁是很像的,只不过在获取锁时不会直接尝试使用CAS来获取锁。
- 只有当队列没节点并且state为0时才会去获取锁,不然都会把当前线程放到队列中
流程图